Dom Diff 算法
为什么要有 Dom Diff 算法
Vue 实现 DOM Diff 算法的主要原因有:
- 提高重渲染效率 Vue 使用虚拟 DOM 来追踪数据变更和 DOM 状态.当数据变化时,diff 算法可以找出需要更新的最小 DOM 元素,而不是全部重新渲染,从而提高效率.
- 实现响应式视图 diff 算法让 Vue 可以精确知晓哪些部件需要更新,从而实现视图与数据的响应式绑定,当数据变化时视图自动更新.
- 优化性能消耗 减少不必要的 DOM 操作是提高性能的关键.diff 算法生成补丁运算,最小化了页面重绘与回流,大幅优化了性能消耗.
- 解耦视图与数据 Vue 通过虚拟 DOM 实现了视图和数据的解耦,开发者只需要关注数据变更,无需直接操作 DOM.
- 提供统一编程模型 diff 算法为 Vue 的声明式编程模型提供了核心支持,开发者可以声明视图的期望状态.
综上,diff 算法是 Vue 高效实现响应式视图的关键,既降低了视图更新的性能消耗,也提高了框架的易用性.这是 Vue 作为主流框架的重要基石.
Diff 对比规则
Vue 的 diff 算法是同层比较,不会跨层比较,时间复杂度为 O(N).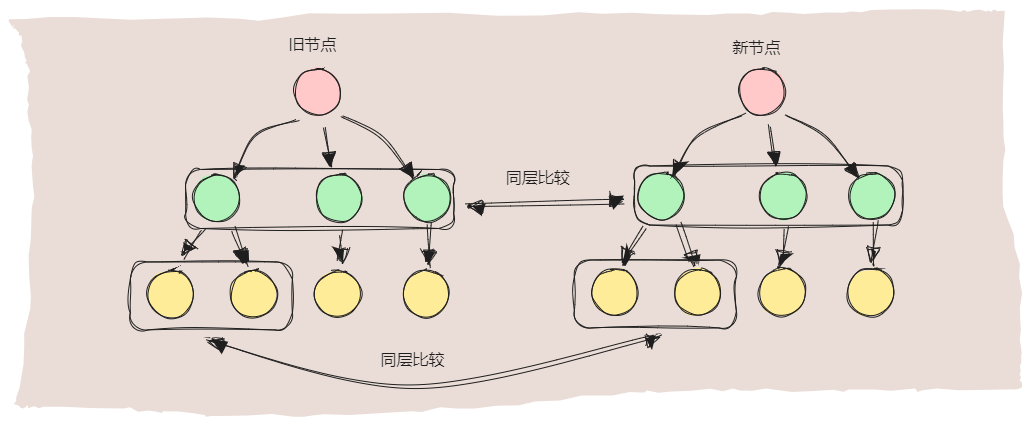
同层级内比较规则
这个同层级比较规则 vue2 和 vue3 实现略有不同
Vue2 实现过程2.6.14
下面代码是 Vue2 Diff 的代码实现
点击这里展开主要代码 有注释 点击这里查看官方源码
/**
* parentElm 父节点
* oldCh 原来子节点数组
* newCh 新子节点数组
* insertedVnodeQueue 已插入的虚拟节点队列
* 在 diff 结束后,insertedVnodeQueue 会被遍历 用来调用节点的钩子函数
* removeOnly 是一个特殊标志 由transition group控制
*/
function updateChildren(
parentElm,
oldCh,
newCh,
insertedVnodeQueue,
removeOnly
) {
let oldStartIdx = 0; // 旧节点起始指针
let newStartIdx = 0; // 新节点起始指针
let oldEndIdx = oldCh.length - 1; // 旧节点结束指针
let oldStartVnode = oldCh[0]; // 旧节点开始虚拟节点
let oldEndVnode = oldCh[oldEndIdx]; // 旧节点结束虚拟节点
let newEndIdx = newCh.length - 1; // 新节点结束指针
let newStartVnode = newCh[0]; // 新节点开始虚拟节点
let newEndVnode = newCh[newEndIdx]; // 新节点结束虚拟节点
let oldKeyToIdx, idxInOld, vnodeToMove, refElm;
// removeOnly是一个特殊标志,
// 仅由<transition group>使用
// 以确保移除的元件在离开过渡期间保持在正确的相对位置
const canMove = !removeOnly;
if (process.env.NODE_ENV !== "production") {
// 检查key是否重复
checkDuplicateKeys(newCh);
}
while (
oldStartIdx <= oldEndIdx &&
newStartIdx <= newEndIdx /* diff 处理 以及终止条件 */
) {
if (isUndef(oldStartVnode) /* 确保oldStartIdx 始终指向正确的虚拟节点 */) {
// 旧虚拟列表开始指针右移
oldStartVnode = oldCh[++oldStartIdx];
} else if (
isUndef(oldEndVnode) /* 确保oldEndIdx 始终指向正确的虚拟节点 */
) {
// 旧虚拟列表结束指针左移
oldEndVnode = oldCh[--oldEndIdx];
} else if (sameVnode(oldStartVnode, newStartVnode) /*头头比较*/) {
// 在newStartIdx位置patch更新
patchVnode(
oldStartVnode,
newStartVnode,
insertedVnodeQueue,
newCh,
newStartIdx
);
// 所有开始指针右移
oldStartVnode = oldCh[++oldStartIdx];
newStartVnode = newCh[++newStartIdx];
} else if (sameVnode(oldEndVnode, newEndVnode) /*尾尾比较*/) {
// 在newEndIdx位置patch更新
patchVnode(
oldEndVnode,
newEndVnode,
insertedVnodeQueue,
newCh,
newEndIdx
);
// 所有结束指针左移
oldEndVnode = oldCh[--oldEndIdx];
newEndVnode = newCh[--newEndIdx];
} else if (
sameVnode(oldStartVnode, newEndVnode) /*旧虚拟列表头与新虚拟列表尾比较*/
) {
// 在newEndIdx位置patch更新
patchVnode(
oldStartVnode,
newEndVnode,
insertedVnodeQueue,
newCh,
newEndIdx
);
canMove &&
nodeOps.insertBefore(
parentElm,
oldStartVnode.elm,
nodeOps.nextSibling(oldEndVnode.elm)
);
// 旧虚拟列表开始指针右移
oldStartVnode = oldCh[++oldStartIdx];
// 新虚拟列表结束指针左移
newEndVnode = newCh[--newEndIdx];
} else if (
sameVnode(oldEndVnode, newStartVnode) /*旧虚拟列表尾与新虚拟列表头比较*/
) {
// 在newStartIdx位置patch更新
patchVnode(
oldEndVnode,
newStartVnode,
insertedVnodeQueue,
newCh,
newStartIdx
);
canMove &&
nodeOps.insertBefore(parentElm, oldEndVnode.elm, oldStartVnode.elm);
// 旧虚拟列表结束指针左移
oldEndVnode = oldCh[--oldEndIdx];
// 新虚拟列表开始指针右移
newStartVnode = newCh[++newStartIdx];
} /* 复杂比较 */ else {
// oldKeyToIdx 是一个 map 对象 内部存储了由 key 到 index 的映射
if (isUndef(oldKeyToIdx))
oldKeyToIdx = createKeyToOldIdx(oldCh, oldStartIdx, oldEndIdx);
// 取出当前newStartVnode针对于 oldCh 的 index
idxInOld = isDef(newStartVnode.key)
? oldKeyToIdx[newStartVnode.key]
: findIdxInOld(newStartVnode, oldCh, oldStartIdx, oldEndIdx);
// 如果idxInOld 无值 则说明 newStartVnode 在旧虚拟列表中不存在
if (isUndef(idxInOld)) {
// 在 newStartIdx 位置创建一个新的虚拟节点
createElm(
newStartVnode,
insertedVnodeQueue,
parentElm,
oldStartVnode.elm,
false,
newCh,
newStartIdx
);
} else {
// 用idxInOld索引值在旧虚拟列表中取出对应的虚拟节点
vnodeToMove = oldCh[idxInOld];
// 如果当前newStartVnode与 取出的节点相同
if (sameVnode(vnodeToMove, newStartVnode)) {
// 在newStartIdx位置patch更新
patchVnode(
vnodeToMove,
newStartVnode,
insertedVnodeQueue,
newCh,
newStartIdx
);
// 并将旧虚拟节点移除
oldCh[idxInOld] = undefined;
canMove &&
nodeOps.insertBefore(parentElm, vnodeToMove.elm, oldStartVnode.elm);
} else {
// 不同则在newEndIdx位置创建一个新的虚拟节点
createElm(
newStartVnode,
insertedVnodeQueue,
parentElm,
oldStartVnode.elm,
false,
newCh,
newStartIdx
);
}
}
// 新虚拟列表开始指针右移
newStartVnode = newCh[++newStartIdx];
}
}
//
if (oldStartIdx > oldEndIdx /* 如果新节点开始位置大于旧节点结束位置 */) {
refElm = isUndef(newCh[newEndIdx + 1]) ? null : newCh[newEndIdx + 1].elm;
// 从newStartIdx到newEndIdx位置添加新的虚拟节点
addVnodes(
parentElm,
refElm,
newCh,
newStartIdx,
newEndIdx,
insertedVnodeQueue
);
} else if (
newStartIdx > newEndIdx /* 如果新节点开始位置大于新节点结束位置 */
) {
// 从oldStartIdx到oldEndIdx位置删除旧的虚拟节点
removeVnodes(oldCh, oldStartIdx, oldEndIdx);
}
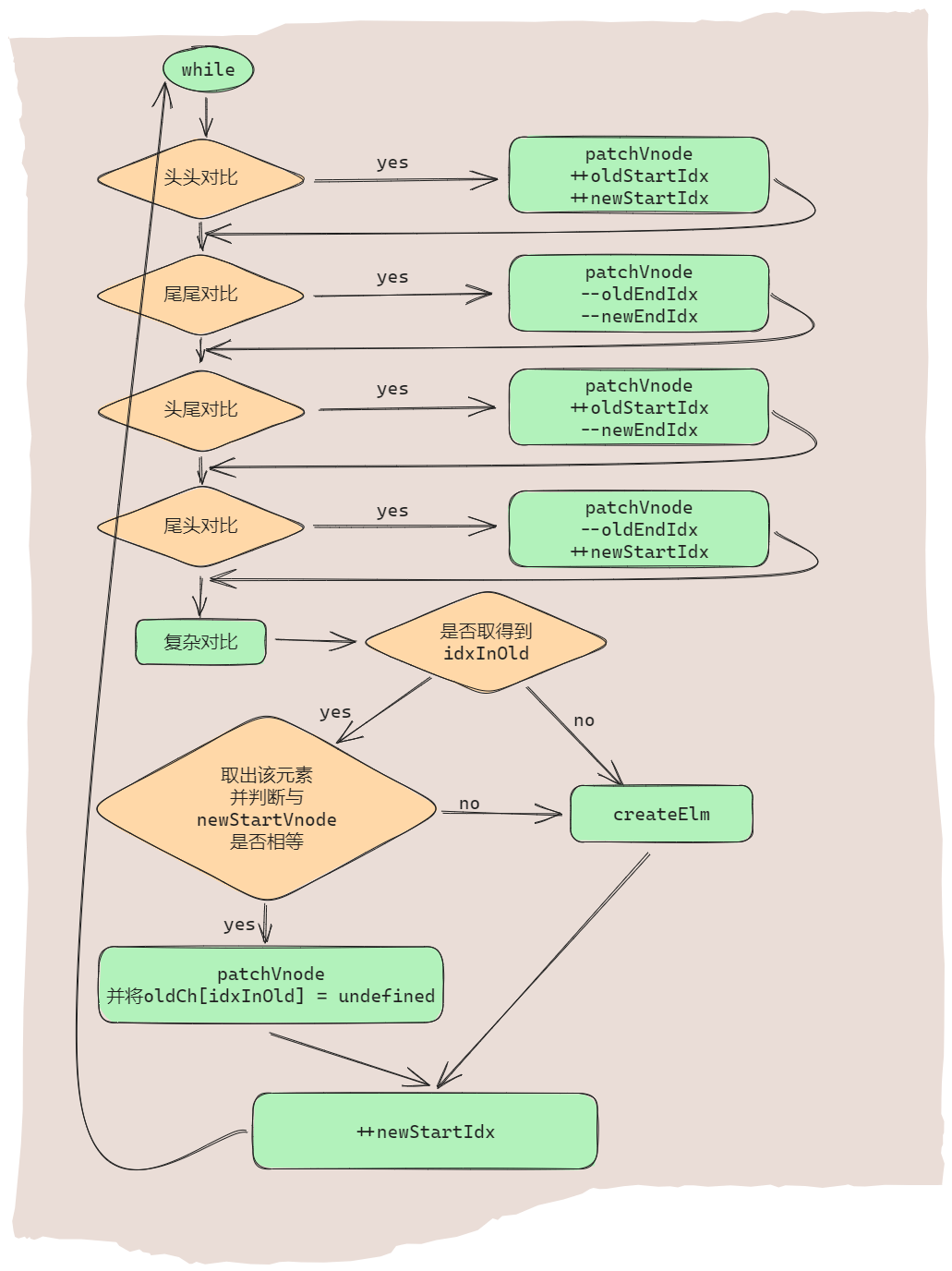
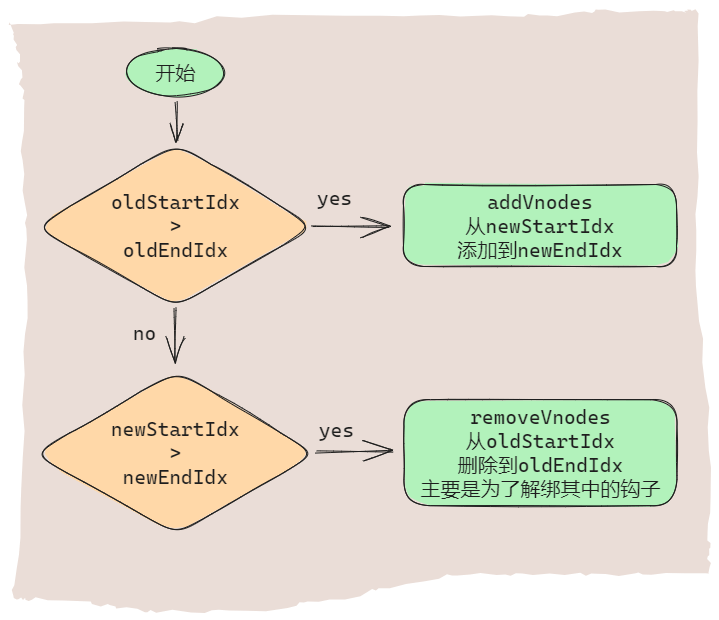
}流程图
Vue2 Dom Diff 过程主要是由 while 循环 和 循环后处理 两个部分构成为了方便理解我这边给上流程图
点击展开 流程图中的单词解释
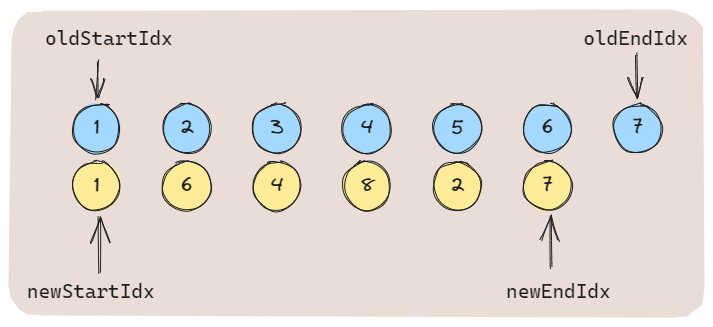
例子展示比较过程
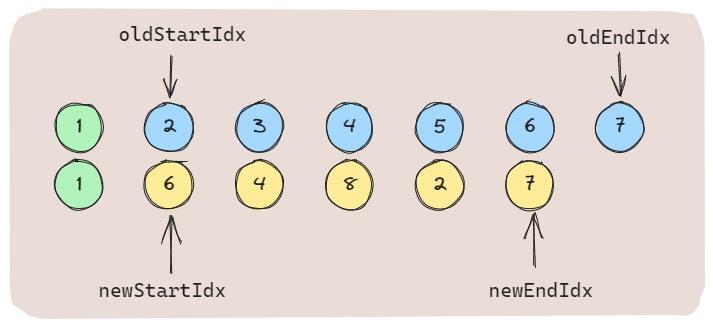
假设现在有节点 1,2,3,4,5,6,7 经过操作变成了 1,6,4,8,2,7
- 蓝色 节点是 旧的虚拟 dom 节点
- 黄色 节点是 新的虚拟 dom 节点
- 变成绿色 说明 diff 成功 已经更新
第一次循环 头头比较 成功 执行patchVnode 两个头指针 右移
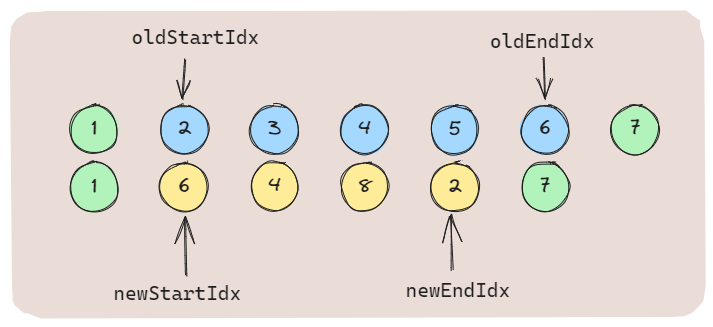
第二次循环 尾尾比较 成功 执行patchVnode 两个尾指针 左移
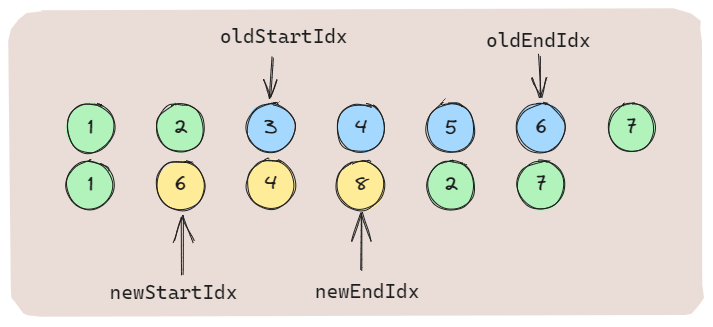
第三次循环 头尾比较 成功 执行patchVnode 旧节点头指针右移 新节点尾指针左移
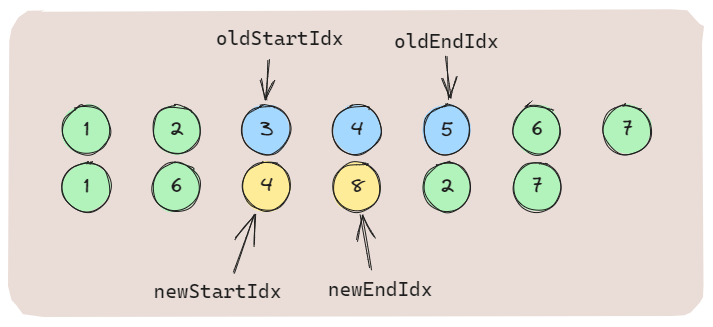
第四次循环 尾头比较 成功 执行patchVnode 旧节点尾指针左移 新节点头指针右移
第五次循环 进入复杂比较 创建 oldKeyToIdx 对象
oldKeyToIdx = {
3: 2,
4: 3,
5: 4,
};当前新节点的 key 为 4,取得 旧列表 下标为 3 的节点 判断两个节点是否 相同
发现 相同
执行 patchVnode 并 将 旧节点 列表 当前下标置为 undefined 然后 新节点头指针右移
第六次循环 进入复杂比较
当前新节点的 key 为 8,未取得 旧列表 中节点
执型 createElm 创建一个 新节点 然后 新节点头指针右移
因 newStartIdx > newEndIdx 终止循环 进入 循环后处理
此时新节点列表已经生成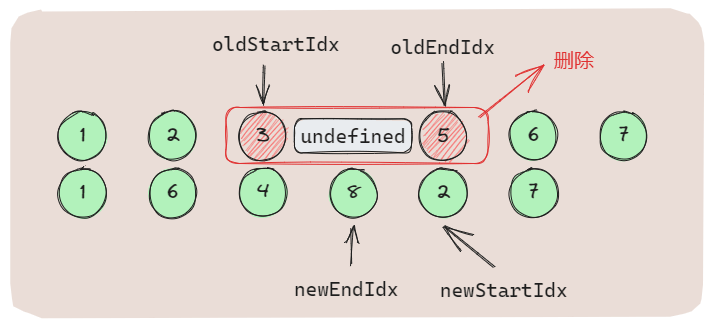
因为 newStartIdx > newEndIdx 可知是 新节点指针作用 停止循环
因此要卸载 旧节点 并取消其上的 钩子函数
结果
复杂遍历过程之中 只 删除了 3,5 节点, 添加了 8 节点, 复制 4,6 节点.高效的完成了新旧节点的遍历转换.
例子缺陷
该例子没有展现出
addVnodes方法 因为这样的情况是要 新节点 的数量比 旧节点 数量多的时候才会出现.(这个好理解)
Vue3 实现过程 3.3.4
下面是 Vue3 Diff 的代码实现
点击这里展开主要代码 有注释 点击这里查看官方源码
// can be all-keyed or mixed
const patchKeyedChildren = (
c1: VNode[], // 旧虚拟节点列表
c2: VNodeArrayChildren, // 新虚拟节点列表
container: RendererElement, // 父容器的真实DOM元素
parentAnchor: RendererNode | null, // 新子节点将插入在该节点前面
parentComponent: ComponentInternalInstance | null, // 父组件实例
parentSuspense: SuspenseBoundary | null, // 父组件的 SuspenseBoundary 实例
isSVG: boolean, // 是否是 SVG
slotScopeIds: string[] | null, // 编译作用域id数组
optimized: boolean // 是否启用优化模式
) => {
let i = 0; // 记录前置索引值
const l2 = c2.length; // 记录新节点列表长度
let e1 = c1.length - 1; // 记录旧节点后置索引值
let e2 = l2 - 1; // 记录新节点后置索引值
// 1. 预处理前置节点
// (a b) c
// (a b) d e
while (i <= e1 && i <= e2) {
const n1 = c1[i];
const n2 = (c2[i] = optimized
? cloneIfMounted(c2[i] as VNode)
: normalizeVNode(c2[i]));
if (isSameVNodeType(n1, n2)) {
// 判断相同原地patch更新
patch(
n1,
n2,
container,
null,
parentComponent,
parentSuspense,
isSVG,
slotScopeIds,
optimized
);
} else {
break;
}
i++;
}
// 2. 预处理后置节点
// a (b c)
// d e (b c)
while (i <= e1 && i <= e2) {
const n1 = c1[e1];
const n2 = (c2[e2] = optimized
? cloneIfMounted(c2[e2] as VNode)
: normalizeVNode(c2[e2]));
if (isSameVNodeType(n1, n2)) {
patch(
n1,
n2,
container,
null,
parentComponent,
parentSuspense,
isSVG,
slotScopeIds,
optimized
);
} else {
break;
}
e1--;
e2--;
}
// 3. 处理仅新增节点情况
// (a b)
// (a b) c
// i = 2, e1 = 1, e2 = 2
// (a b)
// c (a b)
// i = 0, e1 = -1, e2 = 0
if (i > e1) {
if (i <= e2) {
const nextPos = e2 + 1;
const anchor = nextPos < l2 ? (c2[nextPos] as VNode).el : parentAnchor;
while (i <= e2) {
patch(
null,
(c2[i] = optimized
? cloneIfMounted(c2[i] as VNode)
: normalizeVNode(c2[i])),
container,
anchor,
parentComponent,
parentSuspense,
isSVG,
slotScopeIds,
optimized
);
i++;
}
}
}
// 4. 处理仅删除节点情况
// (a b) c
// (a b)
// i = 2, e1 = 2, e2 = 1
// a (b c)
// (b c)
// i = 0, e1 = 0, e2 = -1
else if (i > e2) {
while (i <= e1) {
unmount(c1[i], parentComponent, parentSuspense, true);
i++;
}
}
// 5. 处理其他情况
// [i ... e1 + 1]: a b [c d e] f g
// [i ... e2 + 1]: a b [e d c h] f g
// i = 2, e1 = 4, e2 = 5
else {
const s1 = i; // 记录旧节点列表遍历开始节点索引
const s2 = i; // 记录新节点列表遍历开始节点索引
// 5.1 创建 新节点位置映射表
const keyToNewIndexMap: Map<string | number | symbol, number> = new Map();
for (i = s2; i <= e2; i++) {
const nextChild = (c2[i] = optimized
? cloneIfMounted(c2[i] as VNode)
: normalizeVNode(c2[i]));
// key值重复的提示
if (nextChild.key != null) {
if (__DEV__ && keyToNewIndexMap.has(nextChild.key)) {
warn(
`Duplicate keys found during update:`,
JSON.stringify(nextChild.key),
`Make sure keys are unique.`
);
}
keyToNewIndexMap.set(nextChild.key, i);
}
}
// 5.2 遍历需要patch的节点以及删除不存在的节点
let j;
let patched = 0;
// 记录需要处理节点的长度
const toBePatched = e2 - s2 + 1;
// 用于跟踪是有有任何节点移动
let moved = false;
// 当前距离新节点最远位置 用来判断是否需要移动
let maxNewIndexSoFar = 0;
// 新旧节点位置映射表 注意内部存储的值是 是s1+1的值 因为0是一个 特殊值 用来判断是否是新增节点
const newIndexToOldIndexMap = new Array(toBePatched);
for (i = 0; i < toBePatched; i++) newIndexToOldIndexMap[i] = 0;
for (i = s1; i <= e1; i++) {
const prevChild = c1[i];
if (patched >= toBePatched) {
// 所有的节点在之前处理已经全部patch过 如果再出现那就是需要删除的节点
unmount(prevChild, parentComponent, parentSuspense, true);
continue;
}
// 新节点的位置索引
let newIndex;
if (prevChild.key != null) {
newIndex = keyToNewIndexMap.get(prevChild.key);
} else {
// 无KEY得时候查找
for (j = s2; j <= e2; j++) {
if (
newIndexToOldIndexMap[j - s2] === 0 &&
isSameVNodeType(prevChild, c2[j] as VNode)
) {
newIndex = j;
break;
}
}
}
if (newIndex === undefined) {
// 未找到key进行删除操作
unmount(prevChild, parentComponent, parentSuspense, true);
} else {
// 找到值之后放入 新旧节点位置映射表 中 并根据最远位置判断是否需要移动
newIndexToOldIndexMap[newIndex - s2] = i + 1;
if (newIndex >= maxNewIndexSoFar) {
maxNewIndexSoFar = newIndex;
} else {
moved = true;
}
// 并patch更新
patch(
prevChild,
c2[newIndex] as VNode,
container,
null,
parentComponent,
parentSuspense,
isSVG,
slotScopeIds,
optimized
);
// 更新指针右移
patched++;
}
}
// 5.3 移动和挂载
// 仅当节点移动时生成最长的稳定子序列
const increasingNewIndexSequence = moved
? getSequence(newIndexToOldIndexMap)
: EMPTY_ARR;
j = increasingNewIndexSequence.length - 1;
// 倒序遍历以方便使用最后一个节点为根节点方便循序
for (i = toBePatched - 1; i >= 0; i--) {
const nextIndex = s2 + i;
const nextChild = c2[nextIndex] as VNode;
const anchor =
nextIndex + 1 < l2 ? (c2[nextIndex + 1] as VNode).el : parentAnchor;
if (newIndexToOldIndexMap[i] === 0) {
// 新节点挂载
patch(
null,
nextChild,
container,
anchor,
parentComponent,
parentSuspense,
isSVG,
slotScopeIds,
optimized
);
} else if (moved) {
// 在以下情况下移动:
// 没有 最长递增子序列(例如反向)
// 当前节点不在 最长递增子序列中
if (j < 0 || i !== increasingNewIndexSequence[j]) {
move(nextChild, container, anchor, MoveType.REORDER);
} else {
j--;
}
}
}
}
};流程图
为了方便理解我这边给上流程图
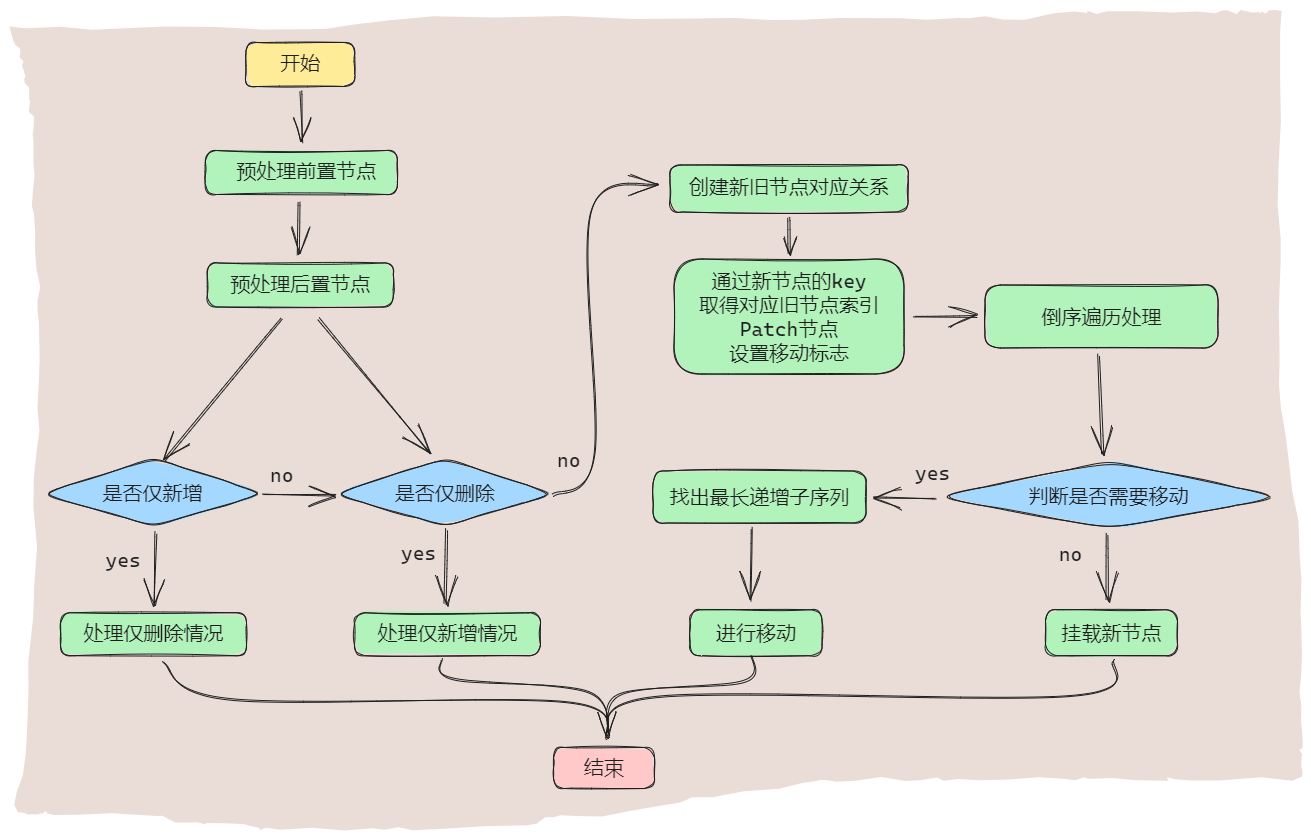
从流程上看 Vue3 相较于 Vue2 简化了很多但是性能上却另有提升,主要是分情况处理了仅添加和仅删除的情况,以及通过最长递增子序列来进行 dom 移动最小化的减少了 dom 的处理.
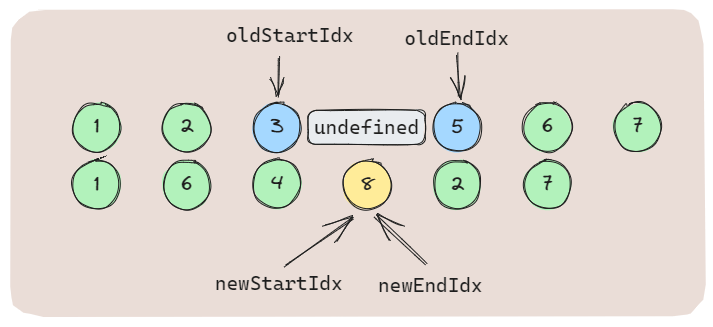
例子展示比较过程
假设现在有节点 n1,n2,n3,n4,n5,n6,n7 经过操作变成了 n1,n6,n4,n5,n8,n7
- 蓝色 节点是 旧的虚拟 dom 节点
- 黄色 节点是 新的虚拟 dom 节点
- 红色 节点是 当前选中比较的节点
- 变成绿色 说明 diff 成功 已经更新
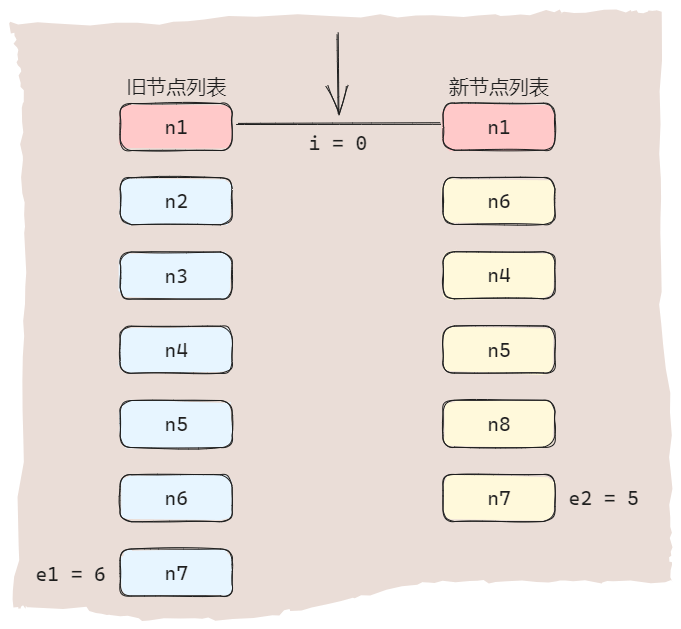
- 创建遍历索引 i = 0
- 创建旧节点结束索引 e1 = 6
- 创建新节点结束索引 e2 = 5
- 开始 预处理前置节点
- n1 节点相同 patch n1
- 继续处理 预处理前置节点
i++
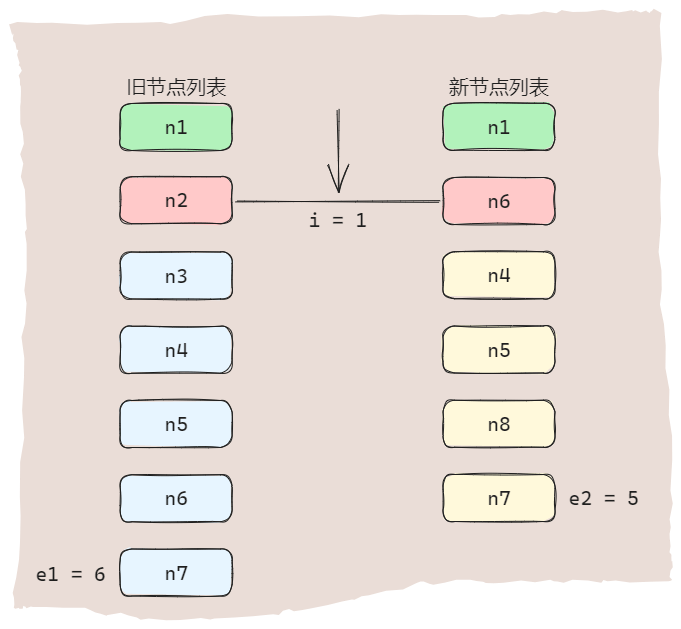
- 此时 i = 1
- 节点 n2 和 节点 n6 不相等
- 结束 预处理前置节点
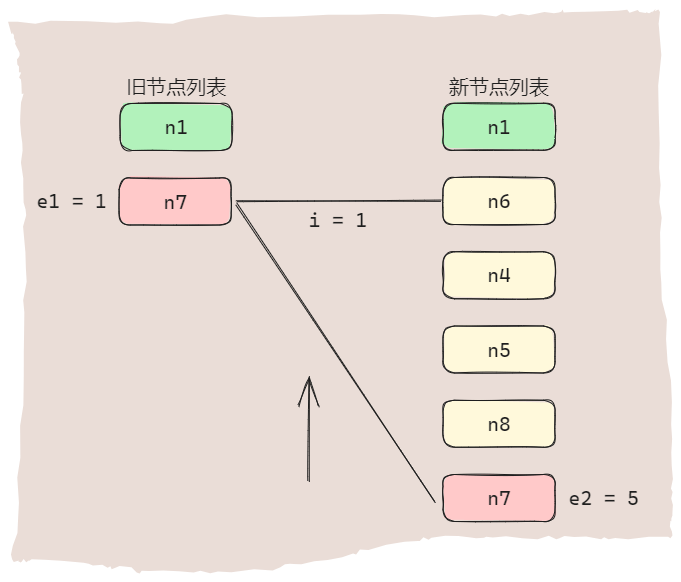
- 开始进行 预处理后置节点
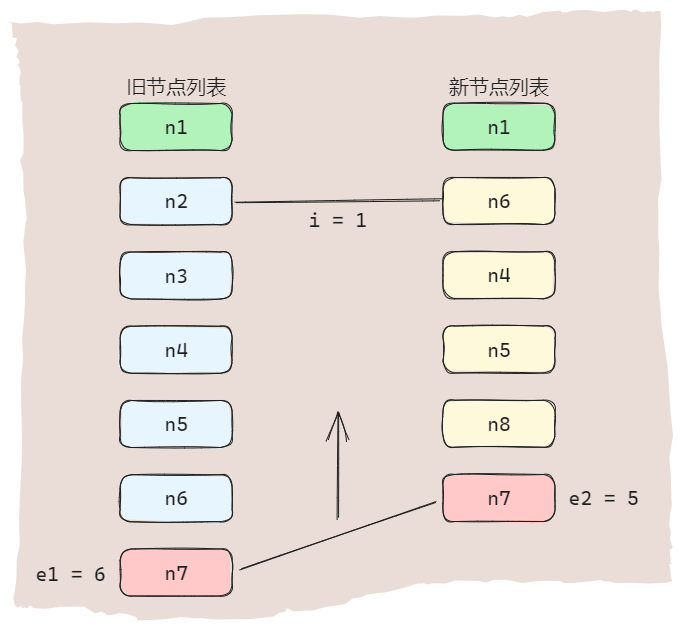
- 旧节点索引 e1 = 6
- 新节点索引 e2 = 5
- n7 节点相同 patch n7
- 继续处理 预处理后置节点
e1--e2--
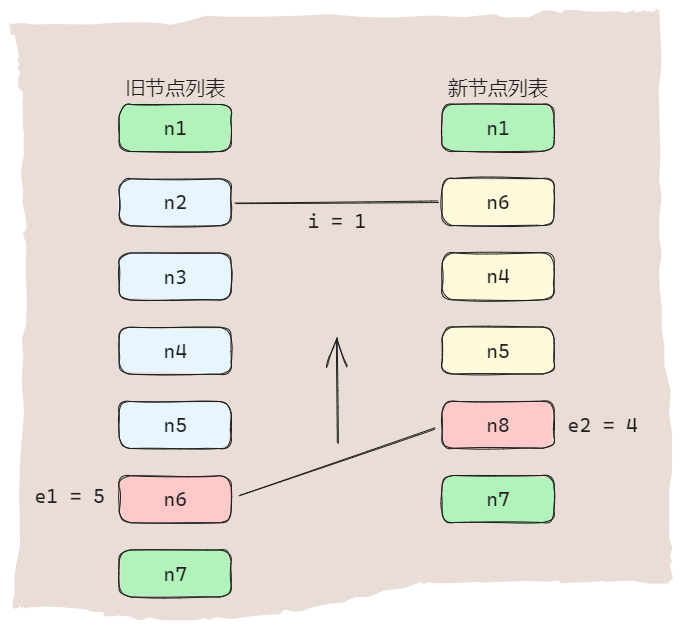
- 旧节点索引 el = 5
- 新节点索引 e2 = 4
- 节点 n6 和 节点 n8 不相等
- 结束 预处理后置节点
仅新增 和 仅删除 情况无法进入复杂处理 展示如下
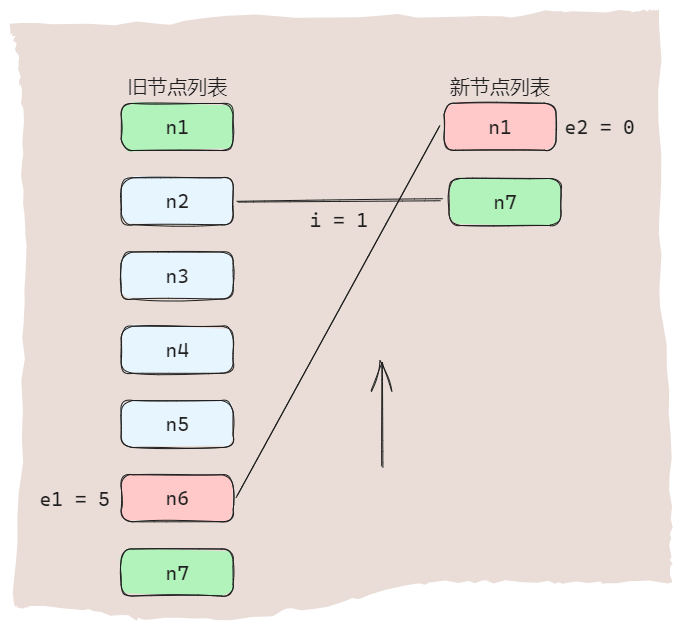
这里是仅新增的情况
处理旧节点列表为 n1,n7 新节点列表为 n1,n6,n4,n5,n8,n7
- 预处理前置节点 已省略 直接过度到 预处理后置节点
- 索引 i = 1
- 旧节点索引 el = 1
- 新节点索引 e2 = 5
- patch n7
- 继续 预处理后置节点
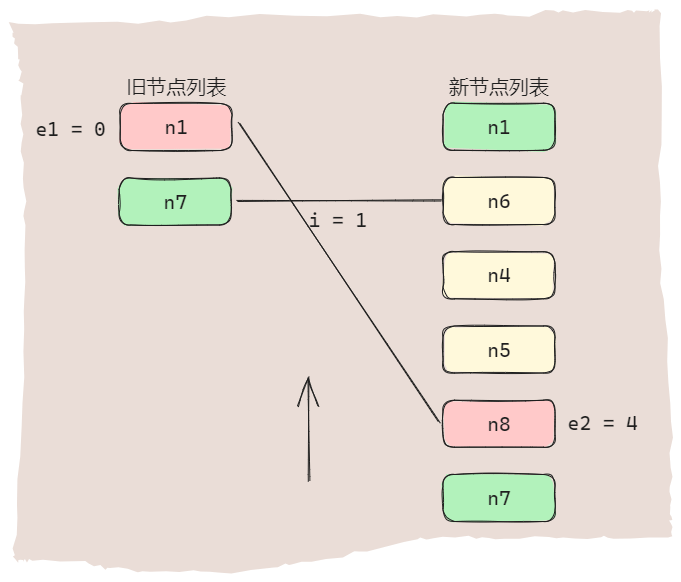
- 索引 i = 1
- 旧节点索引 el = 0
- 新节点索引 e2 = 4
- 节点 n1 和 节点 n8 不相等
- 结束 预处理后置节点
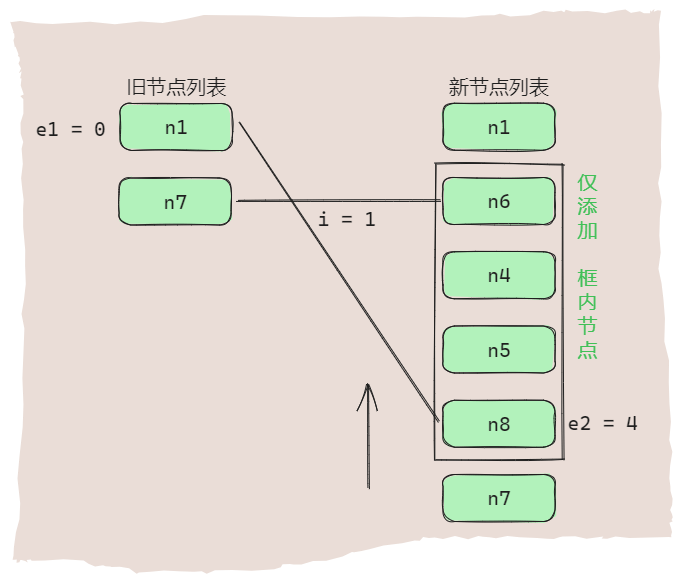
- 但 此时可以发现 当 i > e1 && i <= e2 即可证明剩下节点即为 仅新增节点
- 所以只需要对 n6,n4,n5,n8 进行 新增即可.
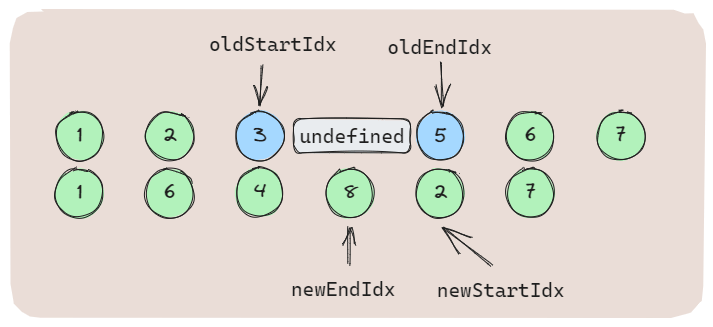
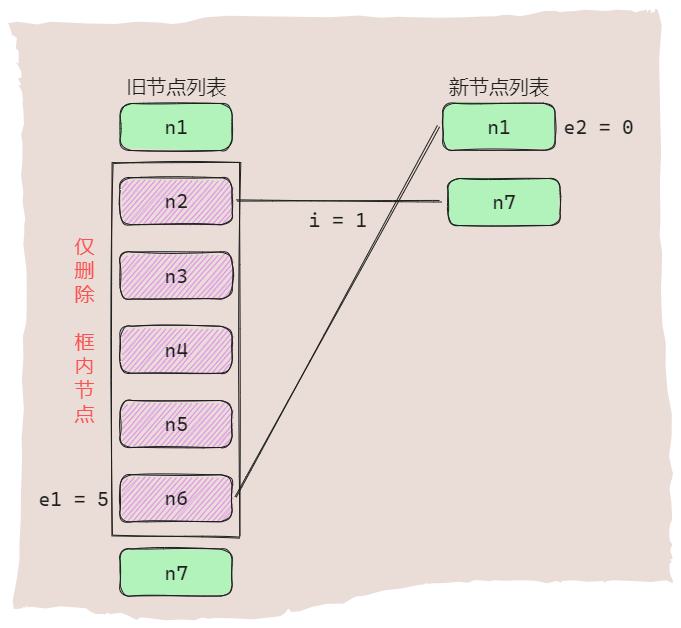
这里是仅删除的情况
处理旧节点列表为 n1,n2,n3,n4,n5,n6,n7 新节点列表为 n1,n7
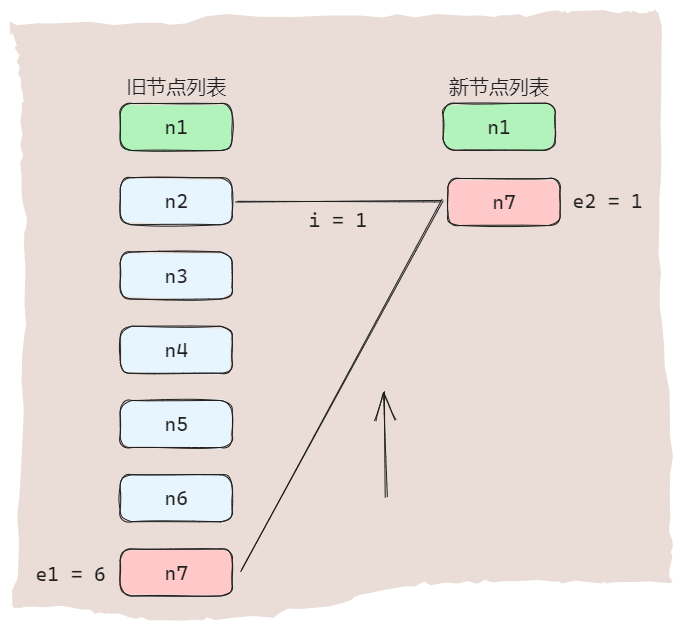
- 预处理前置节点 已省略 直接过度到 预处理后置节点
- 索引 i = 1
- 旧节点索引 el = 6
- 新节点索引 e2 = 1
- patch n7
- 继续 预处理后置节点
- 索引 i = 1
- 旧节点索引 el = 5
- 新节点索引 e2 = 0
- 节点 n6 和 节点 n1 不相等
- 结束 预处理后置节点
- 但 此时可以发现 当 i > e2 && i <= e1 即可证明剩下节点即为 仅删除节点
- 所以只需要对 n2,n3,n4,n5,n6 进行 删除即可.
这里就是 其他复杂情况 也就是 diff 处理核心 了
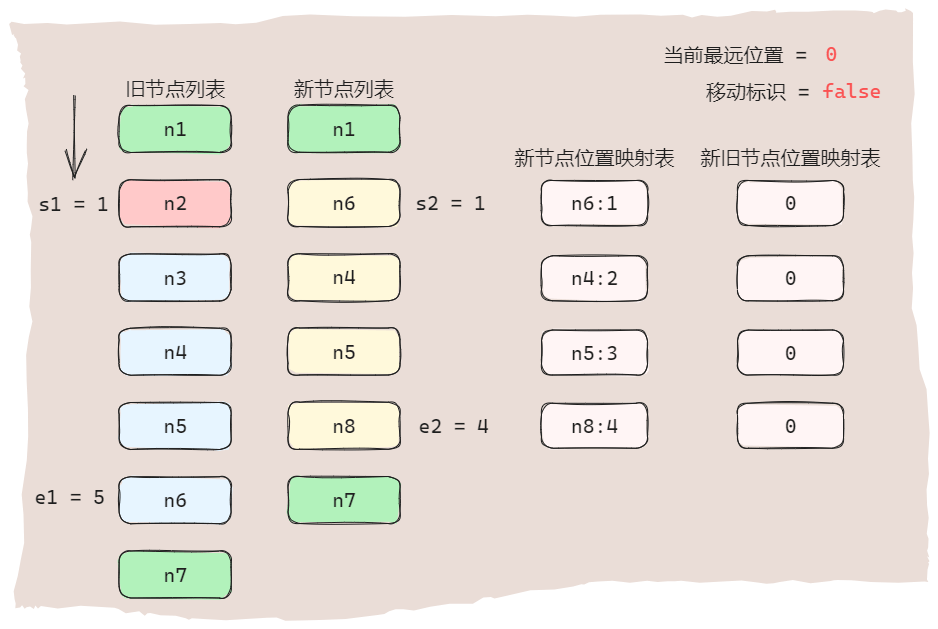
- 创建 s1 = s2 = i = 1
- 创建 新节点位置映射表 如图
- 创建 新旧节点位置映射表 如图
- 设置 当前最远位置 = 0
- 设置 移动标识 = false
- 开始 遍历旧节点列表
- 此时 s1 = 1
- 在 新节点位置映射表 中 未找到 n2 删除 n2 节点
- 继续
s1++
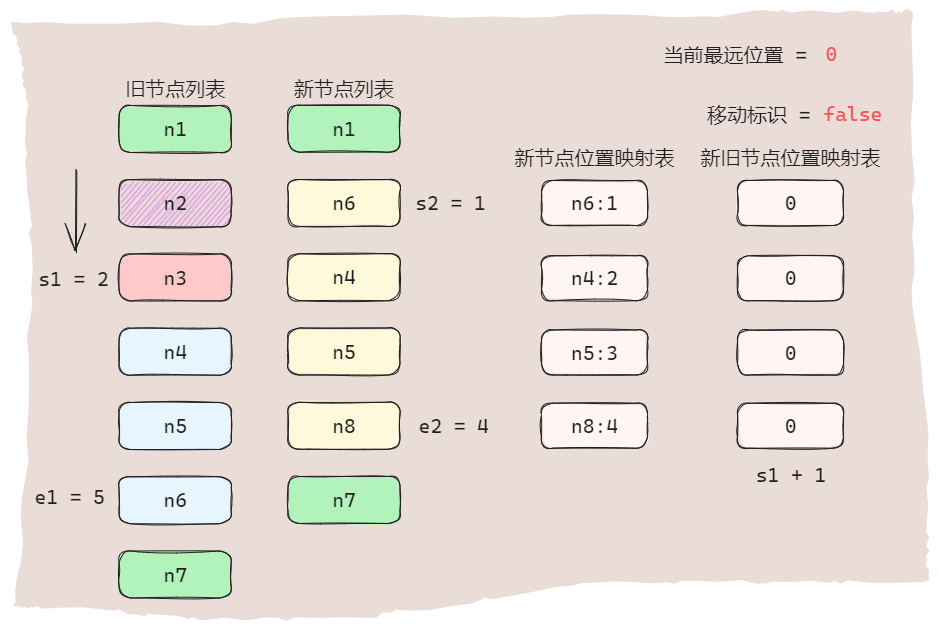
- 此时 s1 = 2
- 在 新节点位置映射表 中 未找到 n3 删除 n3 节点
- 继续
s1++
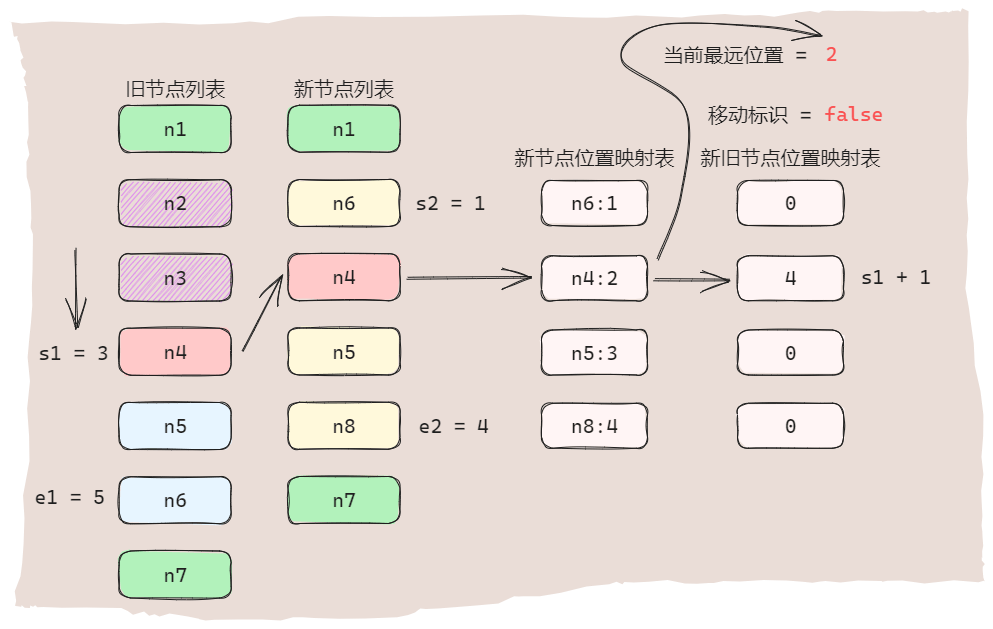
- 此时 s1 = 3 , s2 = 1
- 在 新节点位置映射表 中 找到 n4 取得 新节点索引值 2 将 s1+1 的值 放入 新旧节点映射表 索引为 2 - s2 的 位置
- patch 节点 n4
- 判断 当前最远位置值 0 < 2 将其值置为 2
- 继续
s1++
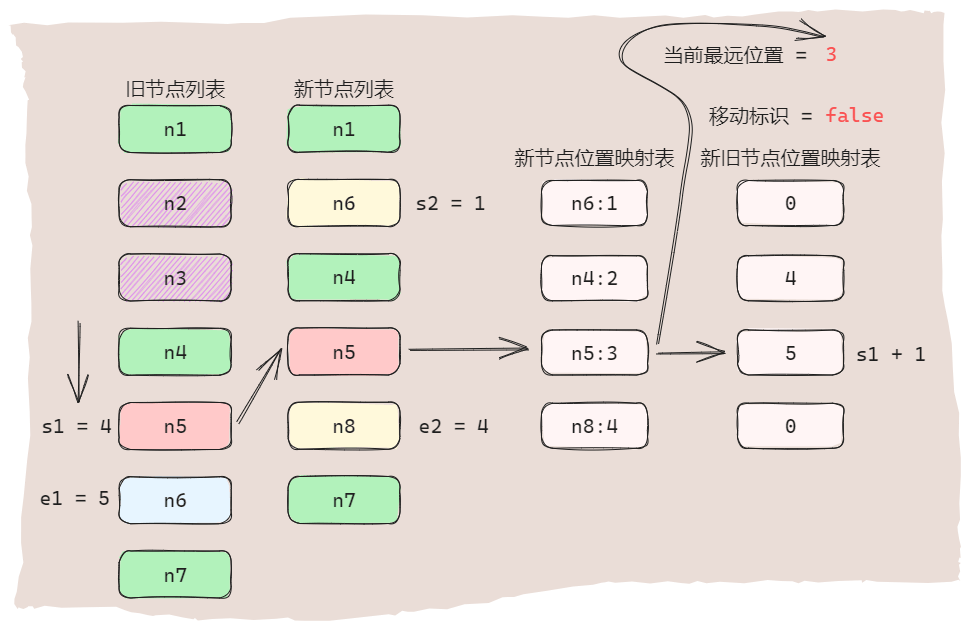
- 此时 s1 = 4 , s2 = 1
- 在 新节点位置映射表 中 找到 n5 取得 新节点索引值 3 将 s1+1 的值 放入 新旧节点映射表 索引为 3 - s2 的 位置
- patch 节点 n5
- 判断 当前最远位置值 2 < 3 将其值置为 3
- 继续
s1++
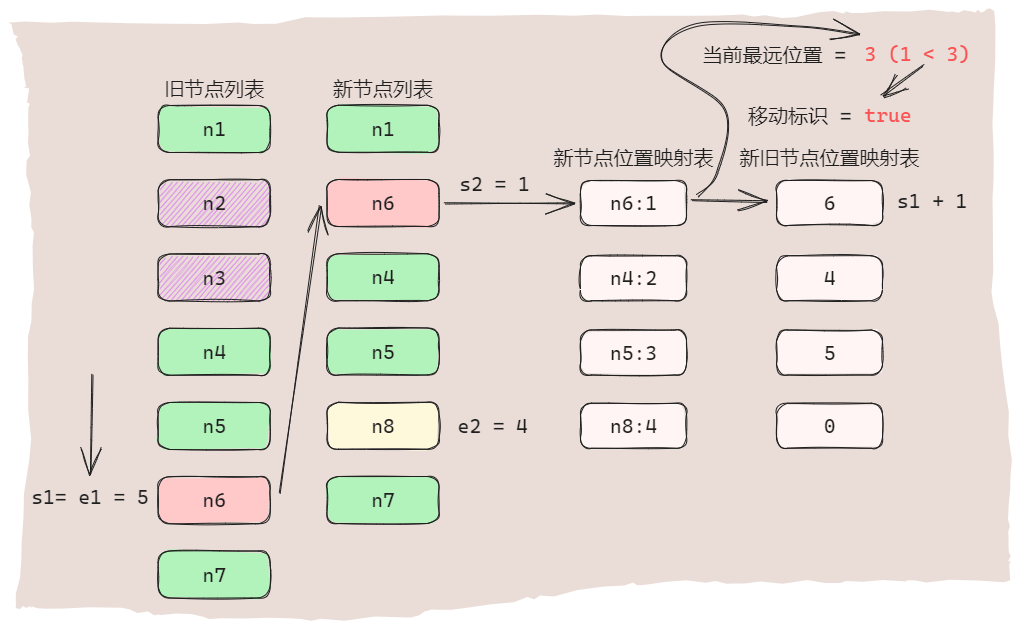
- 此时 s1 = 5 , s2 = 1
- 在 新节点位置映射表 中 找到 n6 取得 新节点索引值 1 将 s1+1 的值 放入 新旧节点映射表 索引为 1 - s2 的 位置
- patch 节点 n6
- 判断 当前最远位置值 3 > 1 将 移动标识置为 true
- 继续
s1++
- 此时 s1 = 6 , e1 = 5
- s1 > e1 结束 旧节点列表遍历
- 原有节点已经 patch 完毕了,剩下就是 新增 和 移动 节点了
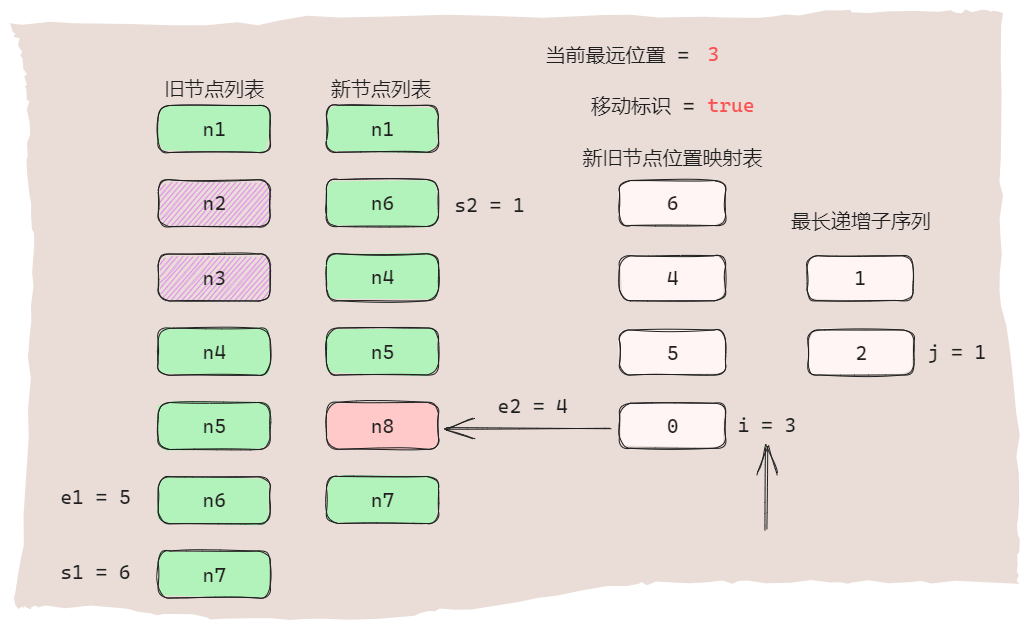
- 因为 移动标识 是 true
- 基于 新旧节点关系映射表 取出其 最长递增子序列 **[4,5]** 此处返回的是其索引值 [1,2]
- 然后 倒序遍历 新旧节点关系映射表
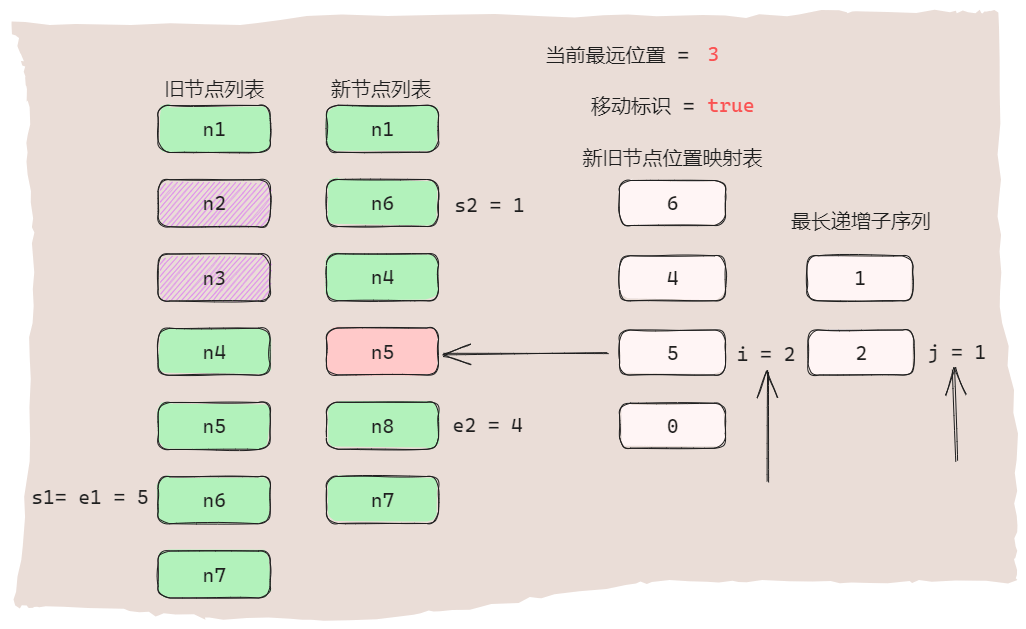
- 创建 新旧节点关系映射表 索引 **i = 3** , 最长递增子序列 索引 j = 1
- 此时 i = 3 对应 n8 节点 新旧节点关系映射表 中 值为 0, 说明 节点 n8 是一个 新增节点 新增 n8
- 继续
i--
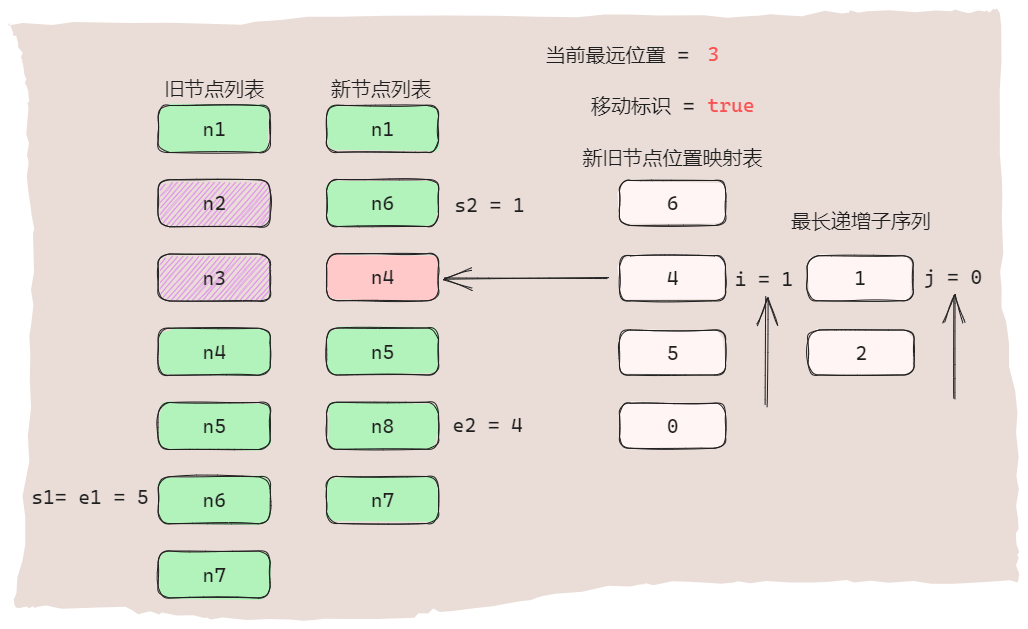
- 此时 i = 2 , j = 1
- 因为 最长递增子序列的第 j 位的值 与 i 相等 所以
j-- - 继续
i--
- 此时 i = 1 , j = 0
- 因为 最长递增子序列的第 j 位的值 与 i 相等 所以
j-- - 继续
i--
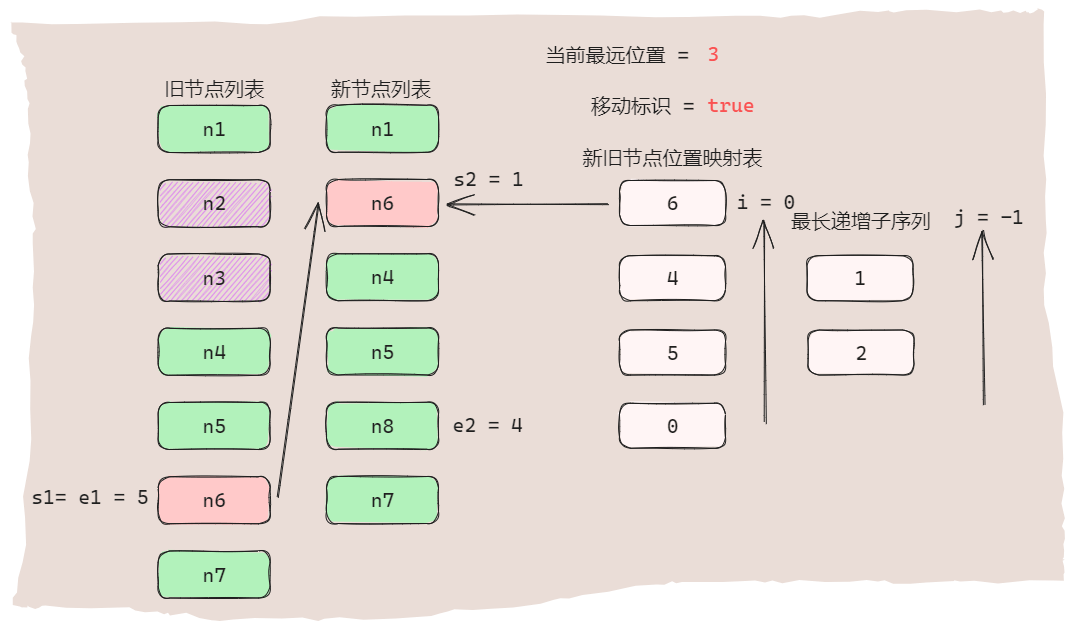
- 此时 i = 0 , j = -1
- 因为 j < 0 所以 执型 move 函数
- 将 n6 移动到 新节点列表 对应位置
- 继续 `i-- = -1` 小于 0 停止倒序遍历
- 至此遍历结束
结果
- 复杂遍历过程之中 只 删除了 n2,n3 节点, 添加了 n8 节点, 移动了 n6 节点.极高效的完成了新旧节点的遍历转换.
总结
Dom Diff 算法 Vue3 相较于 Vue2 中 针对 新增 删除 ,以及 复杂 diff 中的最长递增子序列都增加了对 dom 处理的速度.